Connecting your HuskyLens to the SPIKE Prime or Robot Inventor hub opens up a world of possibilities in face recognition. Imagine your robot identifying faces and responding accordingly. This project empowers you to achieve just that, with the end goal being your hub printing the x, y location of any face detected by the HuskyLens.
Getting Started with Huskylens on SPIKE Prime or Robot Inventor hub
To embark on this exciting journey, you’ll need a few essentials: a HuskyLens and either a Robot Inventor or SPIKE hub. You’ll also need a SPIKE-OPENMV board. These components form the backbone of your face recognition system.
Flash the official LEGO MINDSTORMS Robot Inventor firmware
Before diving into connections, ensure your hub is ready. Flash it with MINDSTORMS software because the latest SPIKE3 doesn’t support this setup. Pybricks doesn’t work either because neither supports a serial port.
Connecting HuskyLens to Your Hub
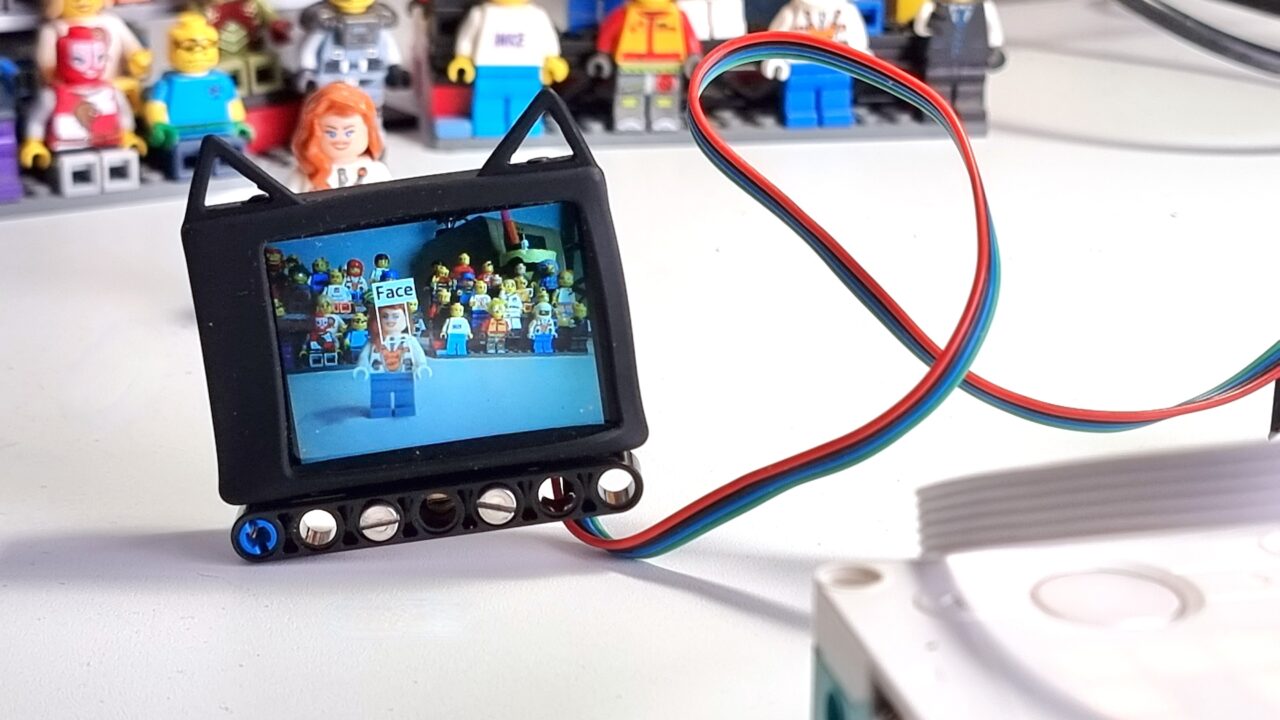
Now comes the fun part—connecting your HuskyLens to the SPIKE-OPENMV board. The photo below shows what colors connect to which pins. The in-between board makes it easy to connect to your hub, with the right plug. But it does more: it generates a steady 5V from the hub battery to feed the power-hungry HuskyLens.

Installing Essential Libraries
Next, install the necessary libraries for communication between devices. Visit the link to the installer script on GitHub and paste its content into a new MINDSTORMS Python program within the app. Run it and watch as text scrolls in the print tray—a sign that everything’s working smoothly.
Running Your First Face Recognition Script
With libraries installed, it’s time to see magic happen! Create a new Python project and paste the contents from this demo script on GitHub. Run it, and witness how your HuskyLens powers up while coordinates appear when faces are detected.
Unleashing Creativity with Custom Scripts
Now that you’ve mastered basic face detection, let creativity take over! Explore possibilities within the HuskyLens library by taking a look at the methods in the pyhuskylens library file on GitHub. Maybe try a face follower or line follower? In any case, have fun with your HuskyLens!





